2. Getting Started¶
2.1. Buying a GoPiGo3¶
To buy a GoPiGo3 robot, please head over to our online shop and search for the GoPiGo3 robot. From our shop, you can get sensors for your robot such as the Distance Sensor, the Light & Color Sensor, etc.

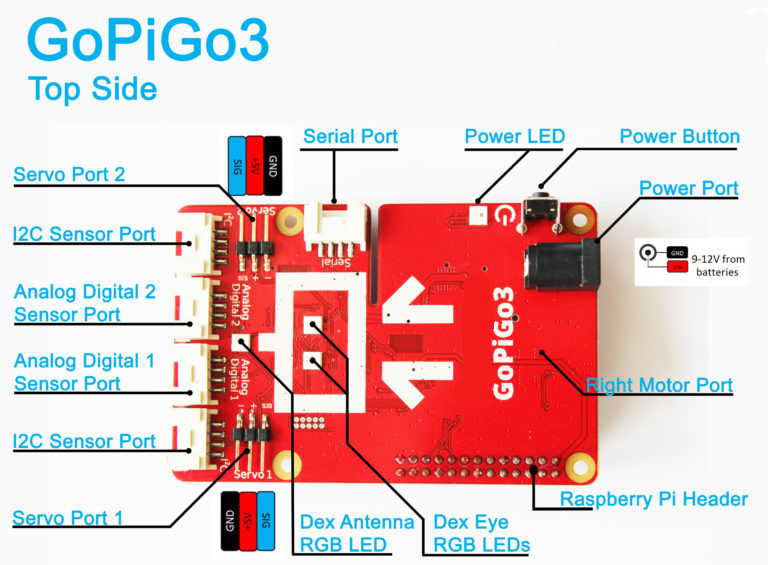
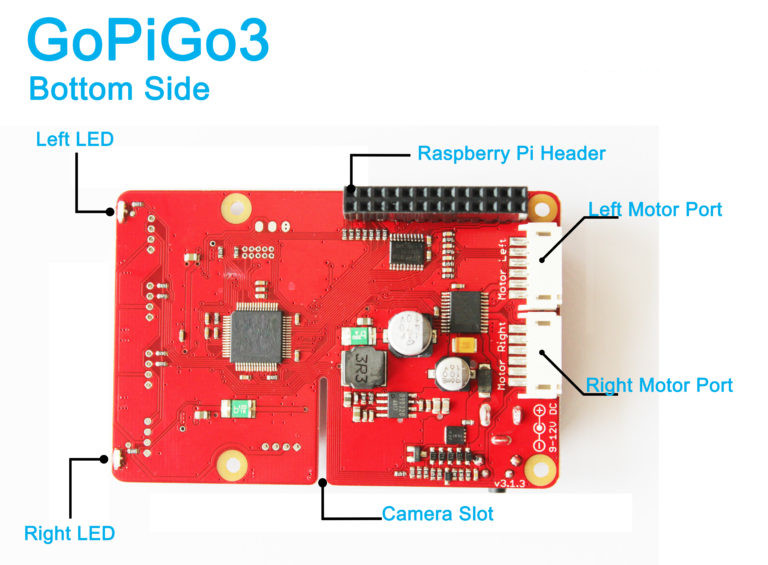
2.2. Getting Familiar with the GoPiGo3¶
The GoPiGo3 offers many connectors and output options, mainly:
two analog digital ports, known as AD1, and AD2.
two I2C ports, which are interchangeable.
two servo connectors.
one serial port.
two “eye” leds for the user to program.
one antenna led to give connection feedback.
one power led to give power level and boot status feedback.
one power button to power it on and off.
one power port to connect the 12V battery pack.
two motor connectors.
2.3. Assembling Your GoPiGo3¶
To assemble your GoPiGo3 robot, read the instructions from the following page: assembling instructions.
2.4. Connecting to your GoPiGo3¶
To connect to your GoPiGo3 robot with a computer or laptop, read the instructions on the following page: connecting to robot.
2.5. Programming your GoPiGo3¶
To program your GoPiGo3 to do what you want, you can follow the rest of instructions found in the Tutorials - Basic section.
To install or update the GoPiGo3 library on your RaspberryPi, open a terminal or the command line and type the following command:
# follow any given instructions given through this command
curl -kL dexterindustries.com/update_gopigo3 | bash
Also, in order to be able to use the easygopigo3.EasyGoPiGo3.init_distance_sensor() and easygopigo3.EasyGoPiGo3.init_line_follower() methods, the DI-Sensors package is required.
You can install it or update it with the following command in the terminal:
# follow any given instructions given through this command
curl -kL dexterindustries.com/update_sensors | bash
2.6. Connecting More Sensors¶
The GoPiGo3 can also be paired with our in-house sensors. There are a number of digital and analog sensors that can be connected to the GoPiGo3.
The Distance Sensor.
The Light & Color Sensor.
The Line Follower Sensor.
The IMU Sensor.
The Infrared Receiver and Infrared Remote.
The Raspberry Pi camera.
For more on getting started with these sensors, please check the DI-Sensors documentation.